第三十一讲:线性变换及对应矩阵
如何判断一个操作是不是线性变换?线性变换需满足以下两个要求:
即变换\(T\)需要同时满足加法和数乘不变的性质。将两个性质合成一个式子为:\(T(cv+dw)=cT(v)+dT(w)\)
例1,二维空间中的投影操作,\(T: \mathbb{R}^2\to\mathbb{R}^2\),它可以将某向量投影在一条特定直线上。检查一下投影操作,如果我们将向量长度翻倍,则其投影也翻倍;两向量相加后做投影与两向量做投影再相加结果一致。所以投影操作是线性变换。
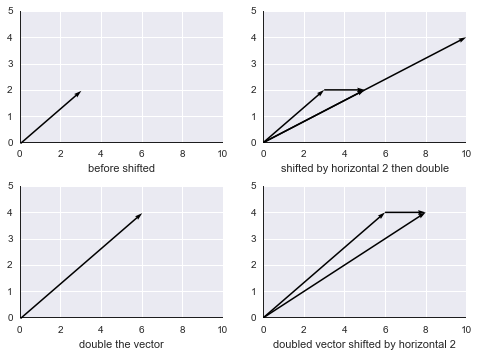
“坏”例1,二维空间的平移操作,即平面平移:
%matplotlib inline
import matplotlib.pyplot as plt
import seaborn as sns
import numpy as np
fig = plt.figure()
sp1 = plt.subplot(221)
vectors_1 = np.array([[0,0,3,2],])
X_1, Y_1, U_1, V_1 = zip(*vectors_1)
plt.axhline(y=0, c='black')
plt.axvline(x=0, c='black')
sp1.quiver(X_1, Y_1, U_1, V_1, angles='xy', scale_units='xy', scale=1)
sp1.set_xlim(0, 10)
sp1.set_ylim(0, 5)
sp1.set_xlabel("before shifted")
sp2 = plt.subplot(222)
vector_2 = np.array([[0,0,3,2],
[3,2,2,0],
[0,0,5,2],
[0,0,10,4]])
X_2,Y_2,U_2,V_2 = zip(*vector_2)
plt.axhline(y=0, c='black')
plt.axvline(x=0, c='black')
sp2.quiver(X_2, Y_2, U_2, V_2, angles='xy', scale_units='xy', scale=1)
sp2.set_xlim(0, 10)
sp2.set_ylim(0, 5)
sp2.set_xlabel("shifted by horizontal 2 then double")
sp3 = plt.subplot(223)
vectors_1 = np.array([[0,0,6,4],])
X_1, Y_1, U_1, V_1 = zip(*vectors_1)
plt.axhline(y=0, c='black')
plt.axvline(x=0, c='black')
sp3.quiver(X_1, Y_1, U_1, V_1, angles='xy', scale_units='xy', scale=1)
sp3.set_xlim(0, 10)
sp3.set_ylim(0, 5)
sp3.set_xlabel("double the vector")
sp4 = plt.subplot(224)
vector_2 = np.array([[0,0,6,4],
[6,4,2,0],
[0,0,8,4]])
X_2,Y_2,U_2,V_2 = zip(*vector_2)
plt.axhline(y=0, c='black')
plt.axvline(x=0, c='black')
sp4.quiver(X_2, Y_2, U_2, V_2, angles='xy', scale_units='xy', scale=1)
sp4.set_xlim(0, 10)
sp4.set_ylim(0, 5)
sp4.set_xlabel("doubled vector shifted by horizontal 2")
plt.subplots_adjust(hspace=0.33)
plt.draw()
plt.close(fig)
比如,上图中向量长度翻倍,再做平移,明显与向量平移后再翻倍的结果不一致。
有时我们也可以用一个简单的特例判断线性变换,检查\(T(0)\stackrel{?}{=}0\)。零向量平移后结果并不为零。
所以平面平移操作并不是线性变换。
“坏”例2,求模运算,\(T(v)=\|v\|,\ T:\mathbb{R}^3\to\mathbb{R}^1\),这显然不是线性变换,比如如果我们将向量翻倍则其模翻倍,但如果我将向量翻倍取负,则其模依然翻倍。所以\(T(-v)\neq -T(v)\)
例2,旋转\(45^\circ\)操作,\(T:\mathbb{R}^2\to\mathbb{R}^2\),也就是将平面内一个向量映射为平面内另一个向量。检查可知,如果向量翻倍,则旋转后同样翻倍;两个向量先旋转后相加,与这两个向量先相加后旋转得到的结果一样。
所以从上面的例子我们知道,投影与旋转都是线性变换。
例3,矩阵乘以向量,\(T(v)=Av\),这也是一个(一系列)线性变换,不同的矩阵代表不同的线性变换。根据矩阵的运算法则有\(A(v+w)=A(v)+A(w),\ A(cv)=cAv\)。比如取\(A=\begin{bmatrix}1&0\\0&-1\end{bmatrix}\),作用于平面上的向量\(v\),会导致\(v\)的\(x\)分量不变,而\(y\)分量取反,也就是图像沿\(x\)轴翻转。
线性变换的核心,就是该变换使用的相应的矩阵。
比如我们需要做一个线性变换,将一个三维向量降至二维,\(T:\mathbb{R}^3\to\mathbb{R}^2\),则在\(T(v)=Av\)中,\(v\in\mathbb{R}^3,\ T(v)\in\mathbb{R}^2\),所以\(A\)应当是一个\(2\times 3\)矩阵。
如果我们希望知道线性变换\(T\)对整个输入空间\(\mathbb{R}^n\)的影响,我们可以找到空间的一组基\(v_1,\ v_2,\ \cdots,\ v_n\),检查\(T\)对每一个基的影响\(T(v_1),\ T(v_2),\ \cdots,\ T(v_n)\),由于输入空间中的任意向量都满足:
所以我们可以根据\(T(v)\)推出线性变换\(T\)对空间内任意向量的影响,得到:
现在我们需要考虑,如何把一个与坐标无关的线性变换变成一个与坐标有关的矩阵呢?
在\(1\)式中,\(c_1,c_2,\cdots,c_n\)就是向量\(v\)在基\(v_1,v_2,\cdots,v_n\)上的坐标,比如分解向量\(v=\begin{bmatrix}3\\2\\4\end{bmatrix}=3\begin{bmatrix}1\\0\\0\end{bmatrix}+2\begin{bmatrix}0\\1\\0\end{bmatrix}+4\begin{bmatrix}0\\0\\1\end{bmatrix}\),式子将向量\(v\)分解在一组标准正交基\(\begin{bmatrix}1\\0\\0\end{bmatrix},\begin{bmatrix}0\\1\\0\end{bmatrix},\begin{bmatrix}0\\0\\1\end{bmatrix}\)上。当然,我们也可以选用矩阵的特征向量作为基向量,基的选择是多种多样的。
我们打算构造一个矩阵\(A\)用以表示线性变换\(T:\mathbb{R}^n\to\mathbb{R}^m\)。我们需要两组基,一组用以表示输入向量,一组用以表示输出向量。令\(v_1,v_2,\cdots,v_n\)为输入向量的基,这些向量来自\(\mathbb{R}^n\);\(w_1,w_2,\cdots,w_m\)作为输出向量的基,这些向量来自\(\mathbb{R}^m\)。
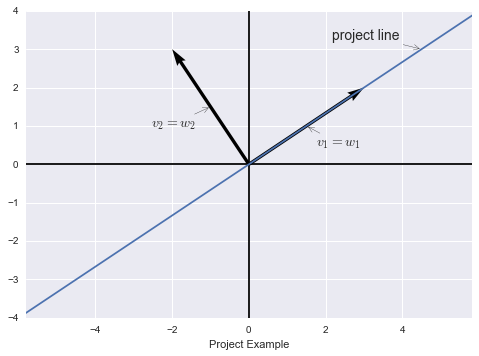
我们用二维空间的投影矩阵作为例子:
fig = plt.figure()
vectors_1 = np.array([[0, 0, 3, 2],
[0, 0, -2, 3]])
X_1, Y_1, U_1, V_1 = zip(*vectors_1)
plt.axis('equal')
plt.axhline(y=0, c='black')
plt.axvline(x=0, c='black')
plt.quiver(X_1, Y_1, U_1, V_1, angles='xy', scale_units='xy', scale=1)
plt.plot([-6, 12], [-4, 8])
plt.annotate('$v_1=w_1$', xy=(1.5, 1), xytext=(10, -20), textcoords='offset points', size=14, arrowprops=dict(arrowstyle="->"))
plt.annotate('$v_2=w_2$', xy=(-1, 1.5), xytext=(-60, -20), textcoords='offset points', size=14, arrowprops=dict(arrowstyle="->"))
plt.annotate('project line', xy=(4.5, 3), xytext=(-90, 10), textcoords='offset points', size=14, arrowprops=dict(arrowstyle="->"))
ax = plt.gca()
ax.set_xlim(-5, 5)
ax.set_ylim(-4, 4)
ax.set_xlabel("Project Example")
plt.draw()
plt.close(fig)
从图中可以看到,设输入向量的基为\(v_1,v_2\),\(v_1\)就在投影上,而\(v_2\)垂直于投影方向,输出向量的基为\(w_1,w_2\),而\(v_1=w_1,v_2=w_2\)。那么如果输入向量为\(v=c_1v_1+c_2v_2\),则输出向量为\(T(v)=c_1v_1\),也就是线性变换去掉了法线方向的分量,输入坐标为\((c_1,c_2)\),输出坐标变为\((c_1,0)\)。
找出这个矩阵并不困难,\(Av=w\),则有\(\begin{bmatrix}1&0\\0&0\end{bmatrix}\begin{bmatrix}c_1\\c_2\end{bmatrix}=\begin{bmatrix}c_1\\0\end{bmatrix}\)。
本例中我们选取的基极为特殊,一个沿投影方向,另一个沿投影法线方向,其实这两个向量都是投影矩阵的特征向量,所以我们得到的线性变换矩阵是一个对角矩阵,这是一组很好的基。
所以,如果我们选取投影矩阵的特征向量作为基,则得到的线性变换矩阵将是一个包含投影矩阵特征值的对角矩阵。
继续这个例子,我们不再选取特征向量作为基,而使用标准基\(v_1=\begin{bmatrix}1\\0\end{bmatrix},v_2=\begin{bmatrix}0\\1\end{bmatrix}\),我们继续使用相同的基作为输出空间的基,即\(v_1=w_1,v_2=w_2\)。此时投影矩阵为\(P=\frac{aa^T}{a^Ta}=\begin{bmatrix}\frac{1}{2}&\frac{1}{2}\\\frac{1}{2}&\frac{1}{2}\end{bmatrix}\),这个矩阵明显没有上一个矩阵“好”,不过这个矩阵也是一个不错的对称矩阵。
总结通用的计算线性变换矩阵\(A\)的方法:
- 确定输入空间的基\(v_1,v_2,\cdots,v_n\),确定输出空间的基\(w_1,w_2,\cdots,w_m\);
- 计算\(T(v_1)=a_{11}w_1+a_{21}w_2+\cdots+a_{m1}w_m\),求出的系数\(a_{i1}\)就是矩阵\(A\)的第一列;
- 继续计算\(T(v_2)=a_{12}w_1+a_{22}w_2+\cdots+a_{m2}w_m\),求出的系数\(a_{i2}\)就是矩阵\(A\)的第二列;
- 以此类推计算剩余向量直到\(v_n\);
- 最终得到矩阵\(A=\left[\begin{array}{c|c|c|c}a_{11}&a_{12}&\cdots&a_{1n}\\a_{21}&a_{22}&\cdots&a_{2n}\\\vdots&\vdots&\ddots&\vdots\\a_{m1}&a_{m2}&\cdots&a_{mn}\\\end{array}\right]\)。
最后我们介绍一种不一样的线性变换,\(T=\frac{\mathrm{d}}{\mathrm{d}x}\):
- 设输入为\(c_1+c_2x+c_3x^3\),基为\(1,x,x^2\);
-
则输出为导数:\(c_2+2c_3x\),基为\(1,x\);
所以我们需要求一个从三维输入空间到二维输出空间的线性变换,目的是求导。求导运算其实是线性变换,因此我们只要知道少量函数的求导法则(如\(\sin x, \cos x, e^x\)),就能求出它们的线性组合的导数。
有\(A\begin{bmatrix}c_1\\c_2\\c_3\end{bmatrix}=\begin{bmatrix}c_2\\2c_3\end{bmatrix}\),从输入输出的空间维数可知,\(A\)是一个\(2\times 3\)矩阵,\(A=\begin{bmatrix}0&1&0\\0&0&2\end{bmatrix}\)。
最后,矩阵的逆相当于对应线性变换的逆运算,矩阵的乘积相当于线性变换的乘积,实际上矩阵乘法也源于线性变换。
